
Kategoriat
Ajoneuvoissa elektroniikan merkitys on kasvanut kaiken aikaa. Tämä koskee myös kaksipyöräisiä, lähtien skoottereista ja päätyen rentojen kruisereiden kautta kiihkeisiin katusportteihin.
Elektroniikalla keskeinen rooli
Elektroniikan ja se toimintoja kontrolloivien ohjelmistojen merkitys on kasvavassa roolissa myös kaksipyöräisissä. Tähän ajoneuvoryhmään kuuluvat moottoripyörät, skootterit ja mopot.
Kaksipyöräisten moottorinohjaus on järjestetty samaan tapaan kuin autoissa tai muissa ajoneuvoissa. Tunnistimien ja antureiden välityksellä kerätään tietoa moottorin toiminnasta ja toimintaolosuhteista.
Kerättyä tietoa verrataan moottorinohjauksen muistilohkoihin tallennettuun dataan. Tämän perusteella moottorinohjauksen toimilaitteille annetaan kuhunkin tilanteeseen sovitettuja ohjauskomentoja. Näin kaksipyöräisten voimalaitteet saadaan säädettyä ja kalibroitua kiristyviin pakokaasu- tai melupäästömääräyksiin.
Kuljettajaa avustaen
Viime aikoina autoissa on alettu käyttää kehittynyttä tunnistinteknologiaa esimerkiksi erilaisten tutkien muodossa. Auton eteen sijoitettu tutka monitoroi edessä olevaa tilaa tällä tavoin ohjaten esimerkiksi mukautuvaa vakionopeussäädintä.
Taaksepäin suunnattu tutka tai tutkat vahtivat niin sanottua kuollutta kulmaa. Tutkien ohjaukseen on alettu käyttää varsin kehittynyttä elektroniikkaa. Ajoneuvoteollisuuden tähtäimessä onkin kehittää edullista ja luotettavaa sensoriikkaa sekä intuitiivista tekoälyä tulevia robottiautoja ja vastaavia ajatellen.
Edellä kuvatun kaltaisia kuljettajaa avustavia laitteita on tullut tai on saatavilla uusimpiin moottoripyörämalleihin.
Myös rakenteet ovat kehittyneet
Toki kaksipyöräisten renkaat, runkorakenteet, jousituskomponentit ja jarrut myös ovat kehittyneet.
Usein etujarrussa on voitu siirtyä käyttämään niin sanottuja radiaalipääsylintereitä, joiden myötä saavutetaan parempi jarrutustuntuma etenkin kahdella jarrusatulalla ja -levyllä varustetussa keulassa.

Lisäksi lukkiutumaton jarrujärjestelmä, tutummin ABS-jarrut, alkavat yhä useammassa tapauksessa olla pakollinen varuste kaksipyöräisissäkin, tästä EU-tyyppihyväksyntä on pitänyt huolen.
Rungot ovat aikaisempaa laadukkaampia, ja etenkin katupyörissä painopiste on asemoitu varsin matalalle. Iskunvaimennus voi olla varustettu aktiivitoiminnalla, jonka tehtävänä on ehkäistä moottoripyörän kuljettajalle yllätyksenä tuleva pompahtelu tai nyökkiminen.
Mekaaninen yhteys katkaistu
Kaksipyöräisten moottoreiden kehittämä tehot ovat vuosikymmenestä toiseen kasvaneet kaiken aikaa, mutta fysiikan lait ovat pysyneet samoina.
Tässäkin on elektroniikka otettu avuksi. Kaasukahvalta ei enää ole mekaanista yhteyttä vaijerin välityksellä tehonsäätöön, johon aikaisemmin käytettiin kaasuttimia.

Nykyisin puhutaan kaasuläppärungoista, joiden kaasuläppiä käytetään sähkökäyttöisen servomoottorin välityksellä. Systeemi on merkistä riippuen saanut lentotekniikkaslangilta kuulostavan nimen Throttle-by-Wire tai Ride-by-Wire.
Useita ajo- tai käyttötiloja
Kuljettajalla on mahdollisuus valita ajotaitoihinsa, mieltymyksiinsä ja olosuhteisiin sopiva ajo- tai käyttötila. Useimmiten valinta tapahtuu vasemmalla käden peukalolla ohjaustangon painike- tai kytkinrykelmästä.
Miedompi tai rauhallisempi ajo- tai käyttötila muuttaa kaasun interventiota ja moottorin käyttäytymistä pehmeämpään ja letkeämpään suuntaan. Tällä tavoin tehontuotto on maltillisempaa kuin reunaehtojen perusteella voisi päätellä. Näin halutaan estää takapyörän luistaminen, mikä voisi johtaa hallitsemattomaan tilanteeseen ja pahimmillaan onnettomuuteen.

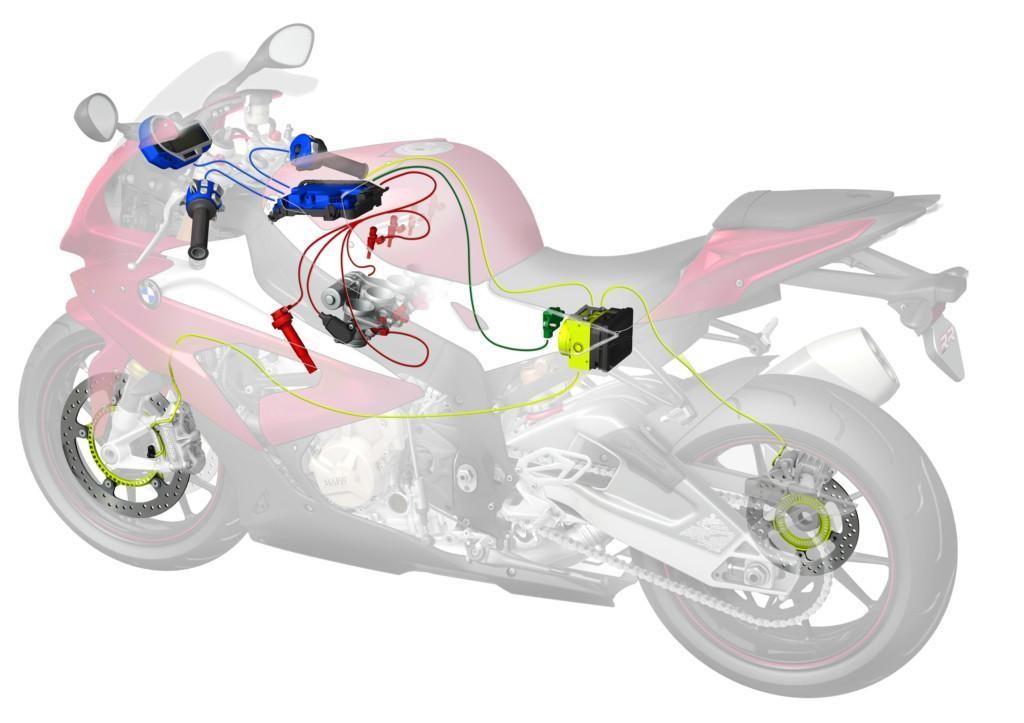
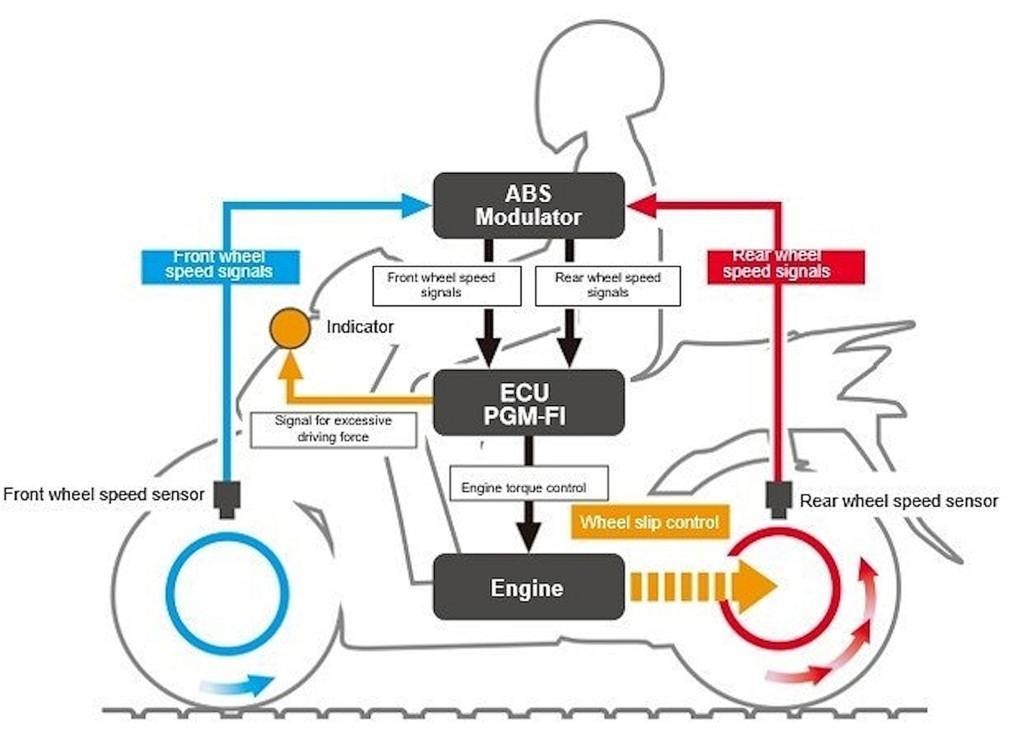
Sekä etu- että takapyörässä on tunnistin, joka seuraa pyörän liiketiloja. Käytännössä nämä tunnistimet ovat samoja kuin ABS-jarruissa käytetyt anturit. Mikäli takapyörä pyrkii pyörimään etupyörää nopeammin, tehonsäätö kuristaa kaasuläppiä sulkeutumissuuntaan, vaikka kuljettaja kaasukahvan välityksellä olisi toista mieltä.
Keksintö nimeltä IMU
Yhä useammin on alettu käyttää kaksipyöräisen turvallisuutta edistävää IMU-inertiamittausyksikköä.
IMU on lyhenne sanoista Inertial Measurement Unit.
IMU:n tehtävänä on mitata kaksipyöräisen liiketiloja kolme akselin suhteen kuuteen eri suuntaan, kuten kääntyminen, rullaus ja kallistus sekä pitkittäiset ja pystysuuntaiset kiihtyvyydet.

Toiminnassaan IMU hyödyntää pintamikromekaniikan mittauselementtejä. Kääntymisnopeusanturin mittauselementti toimii Coriolis-periaatteen mukaisesti. Tarkemmin syynättynä tämä tarkoittaa, että anturissa käytetään värähtelevän massan inertiavoimaa pyörivässä järjestelmässä. Varsin korkean 25 kHz resonanssitaajuuden ja suljetun käyttö- ja arviointiyksikkönsä ansiosta mittauselementti on käytännössä tunteeton mekaanisille häiriöille. Kiihtyvyydet mitataan mikromekaanisten rakenteiden kapasitiivisen muutoksen perusteella sadasosasekunnin välein.
Tiivistettynä IMU-inertiamittausyksikkö parantaa moottoripyörän turvallisuutta, ja yksikön välittämää dataa käytetään muun muassa ABS-jarrujen esiasetuksiin, optimaalisen vetopidon hallinnan ohjaukseen ja keulimisen ehkäisemiseen.

Juha Kiiskinen JK- Textservice
Kirjoittajan arkisto- juha@textservice.fi